Willkommen
Auf meiner Webseite! Hier teile ich meine Projekte, Erfahrungen und Ideen.
(Klicke auf die Überschriften, um die Projekte zu entdecken.)
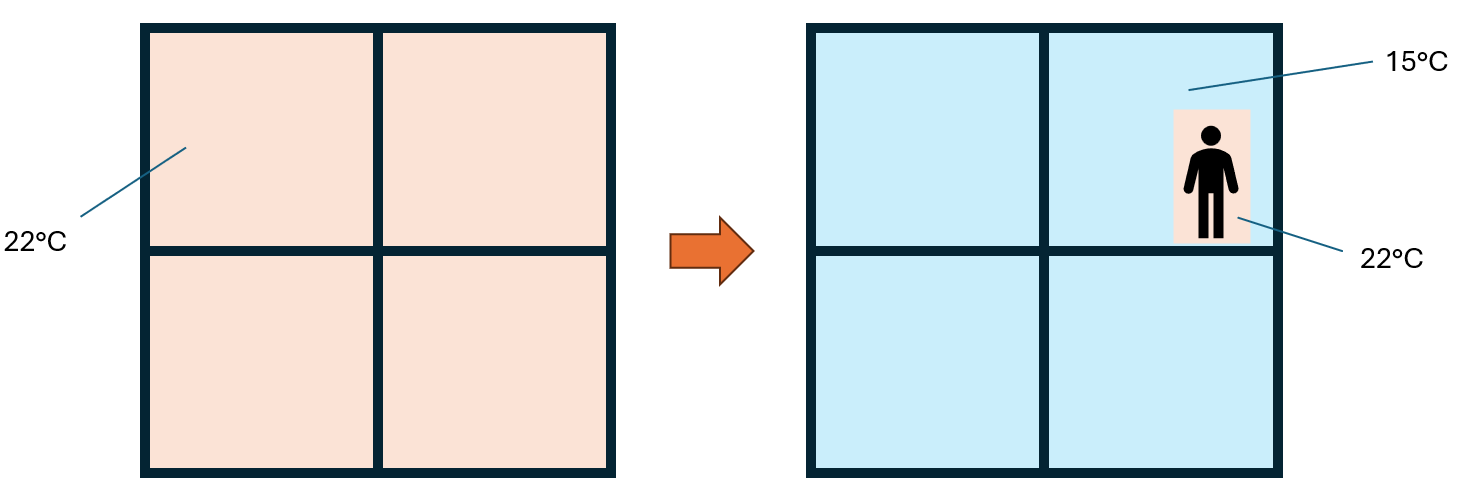
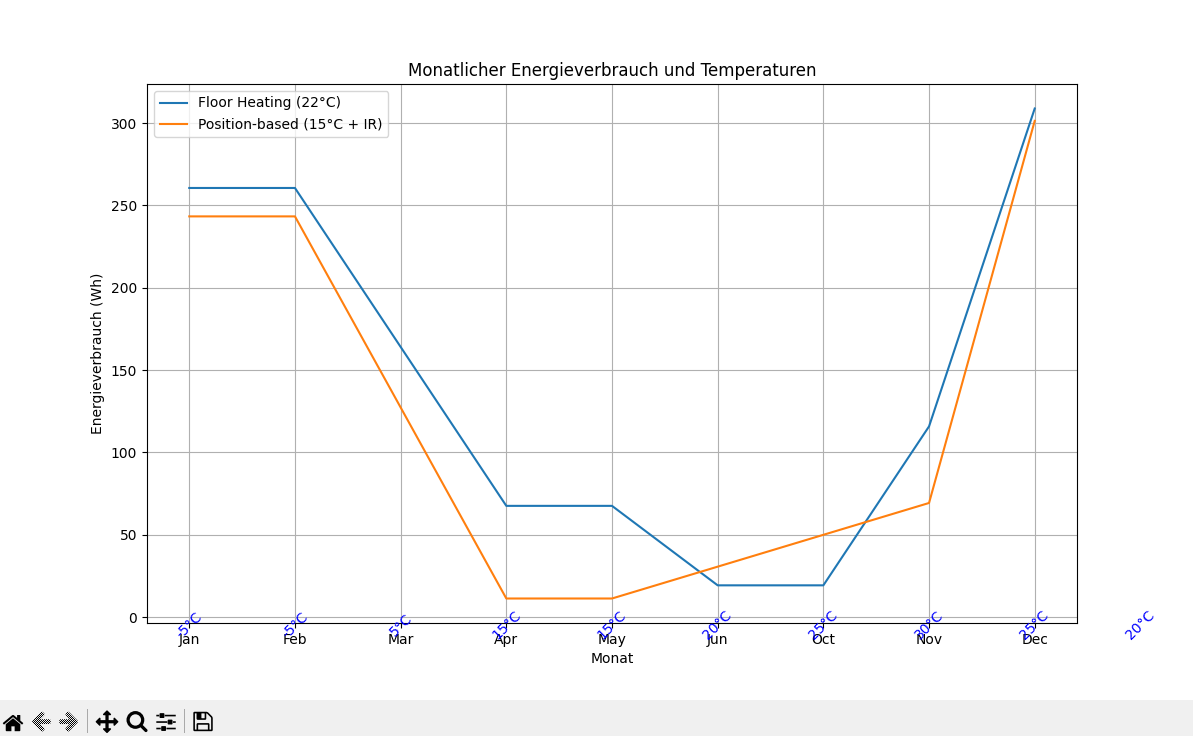
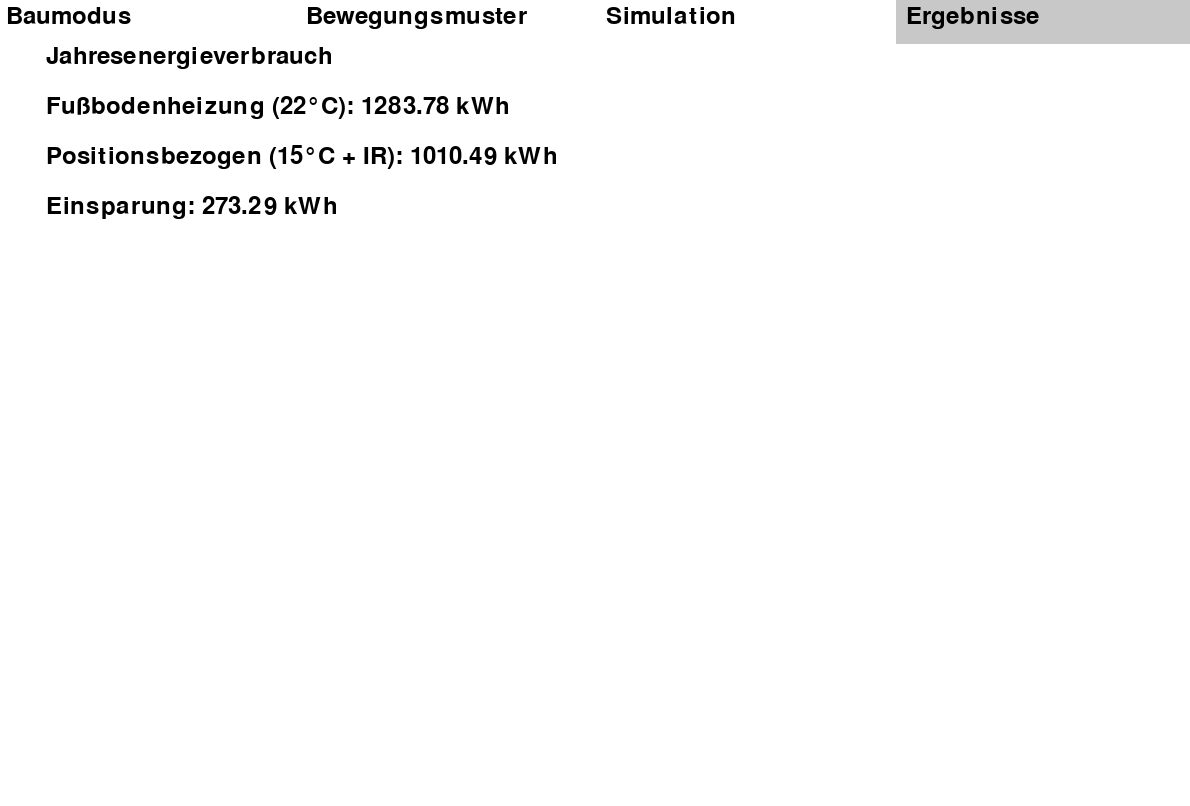
Die Arbeit verfolgt das Ziel, ein innovatives, KI-gestütztes Heizsystem zu entwickeln, das den Übergang von raumbezogenem zu personenbezogenem Heizen ermöglicht.
Zunächst werden verschiedene Heiztechnologien, Sensorik und Datenverarbeitung analysiert, um zu untersuchen, wie Wärmeenergie effizienter genutzt und der Energieverbrauch minimiert werden kann. Dabei wird auch der Einfluss erneuerbarer Energien, insbesondere Photovoltaik, sowie die Wetterbedingungen in die Betrachtung einbezogen.
Ein zentraler Bestandteil der Arbeit ist die Entwicklung und Evaluierung eines Konzepts für eine Heizungssteuerung, die sich dynamisch, anhand vom Nutzungsverhalten, auf die Position und Präferenzen von Personen ausrichten kann. Hierbei werden physikalische Prinzipien der Wärmeausbreitung sowie die Integration von Sensoren und KI-gestützten Steuermechanismen betrachtet.
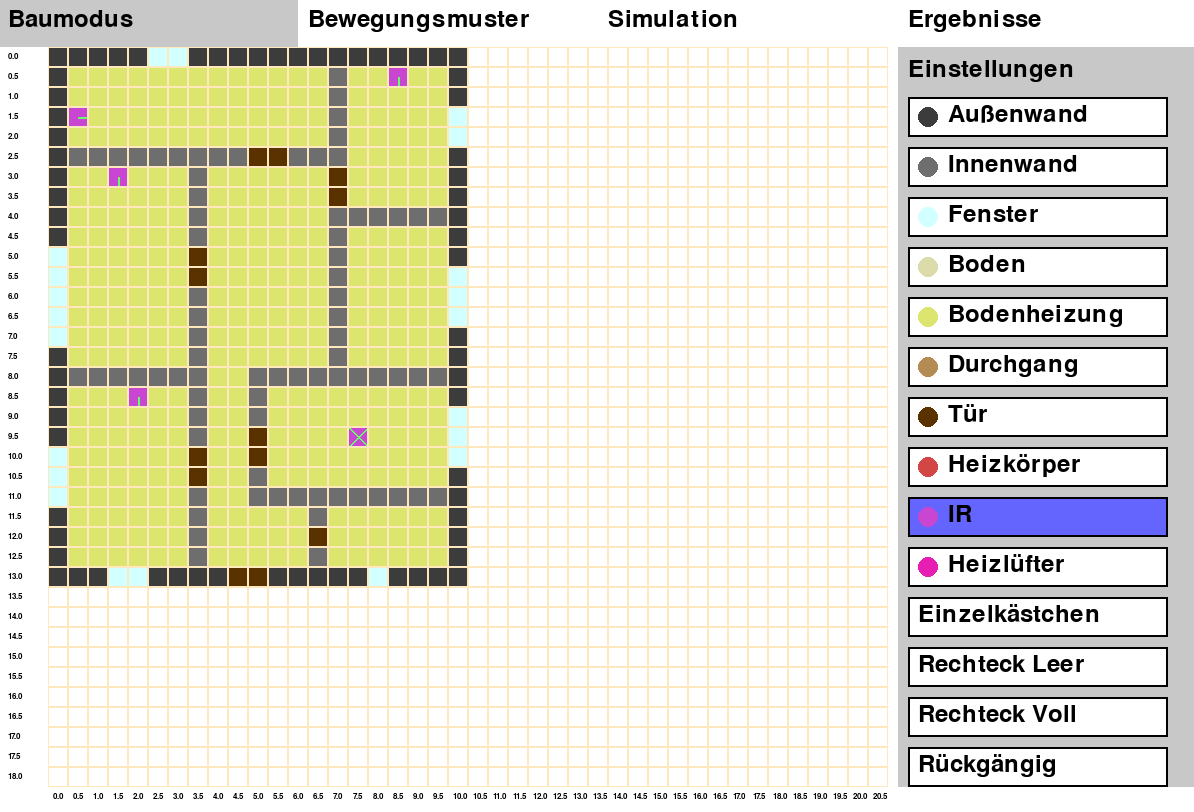
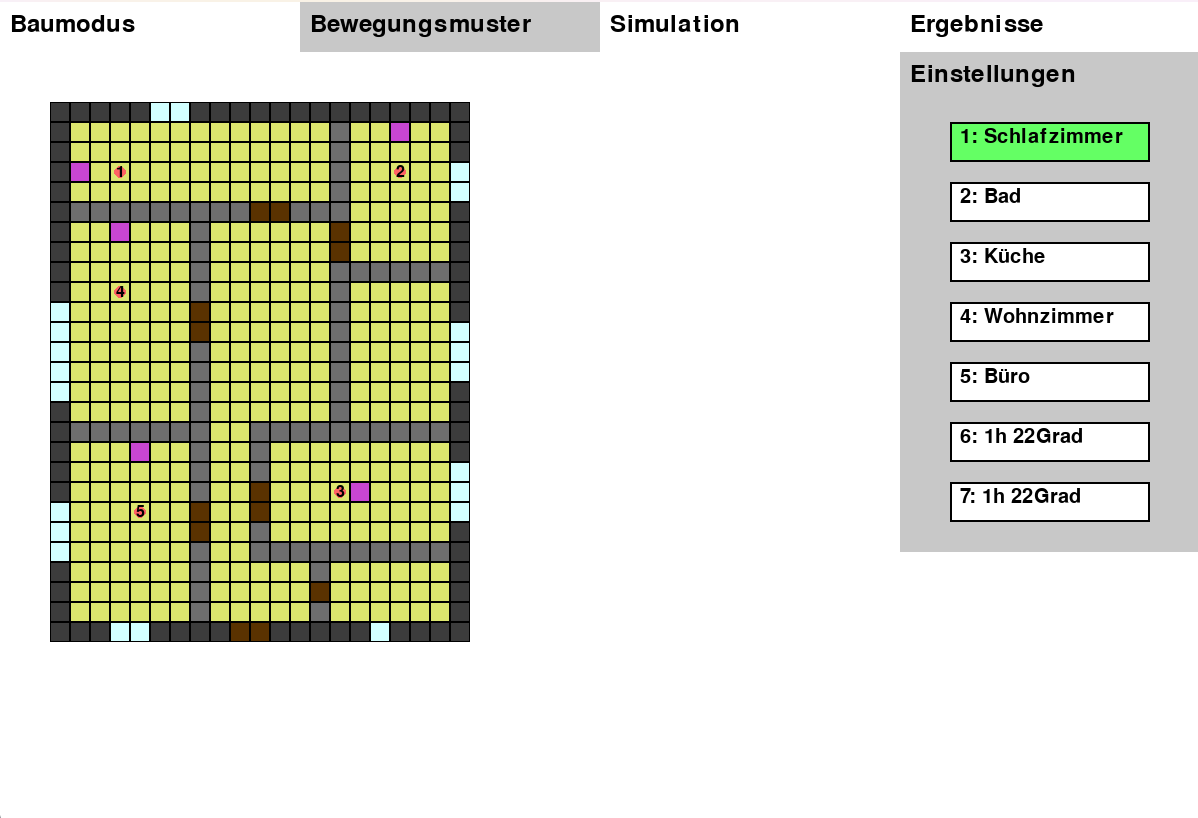
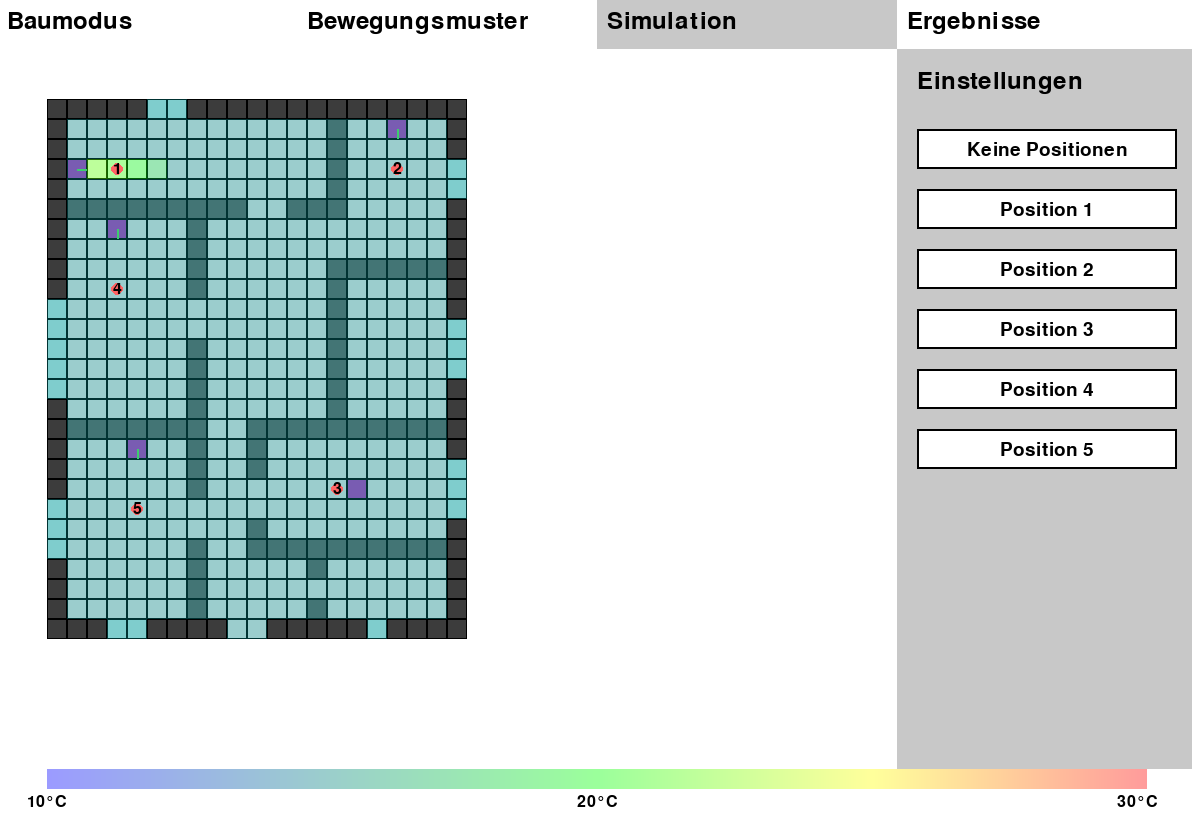
Die Simulation bietet die Möglichkeit einen Gebäudegrundris nachzubauen und die Heizkosten im vergleich zu berechnen. Mit beispielhaften gesetzten Positionen für Schlafzimer oder ähnlichem kann der Energieverbrauchsunterschied dargestellt werden.
Das Projekt ist das Bauen eines Roboterhundes.
Hardware
Der Roboterhund besitzt 8 Servos:
- Pro Bein 2 Servos (Hüfte + Knie).
- Hüftgelenke sollen 12° nach außen gedreht sein, um ein seitliches Abfangen ohne Motoren zu ermöglichen.
Software & Features
Der Roboter soll softwareseitig „pet-like“ werden:
Persönliche Funktionen
- Kleine Idle-Animationen (Wackeln, Nicken, „Atmen“).
- Display-Emotionen (Augen, Freude, Müdigkeit).
- Reaktion auf Ansprechen / Präsenz.
Autonomes Verhalten
- Patrouillieren, leise folgen, auf Zuruf reagieren.
- Interaktion über Sensoren später möglich (Ton, Licht, Kamera).
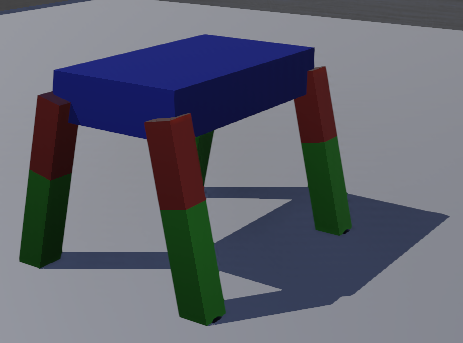
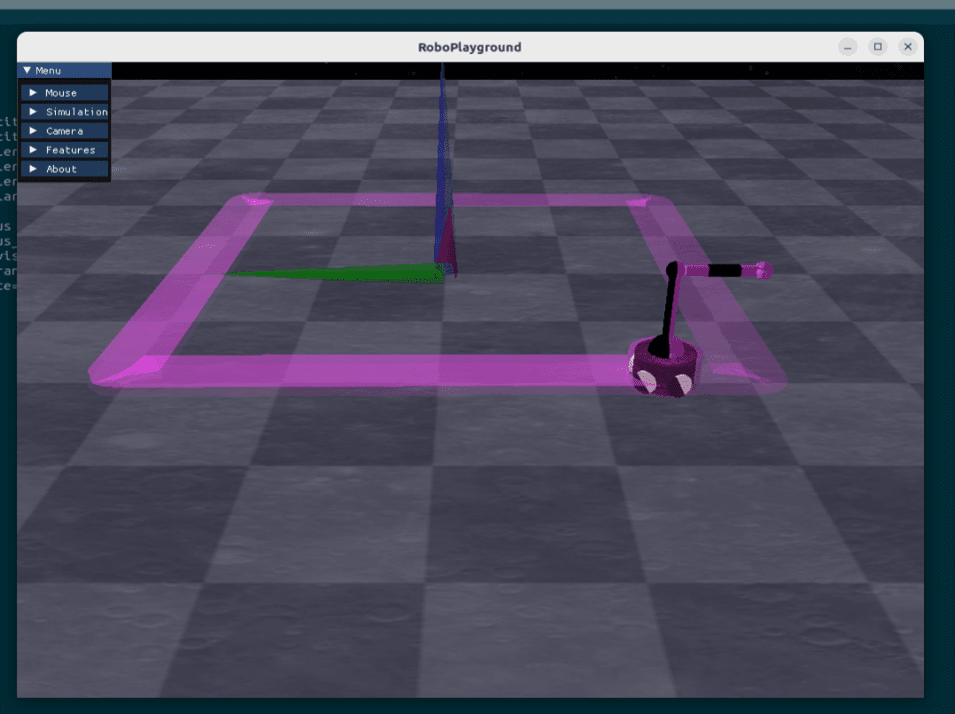
Aktuell ist es nur eine Simulation, um zu testen, ob durch die 12 Grad Rotation des Schulter Gelenkes, ein seitliches Abfangen möglich ist und der Schulter Motor dadruch weggelassen werden kann.
Folgend ist ein gerendertes Bild des Roboterhundes zu sehen und ein Ausschnitt der Simulation.

Die Bachelorarbeit beschäftigt sich mit der Entwicklung eines intelligenten und reaktiven Fluchtwegesystems, das im Gegensatz zu den statischen Fluchtwegeschildern, die derzeit in Gebäuden verwendet werden, dynamisch auf Notfallsituationen reagiert.
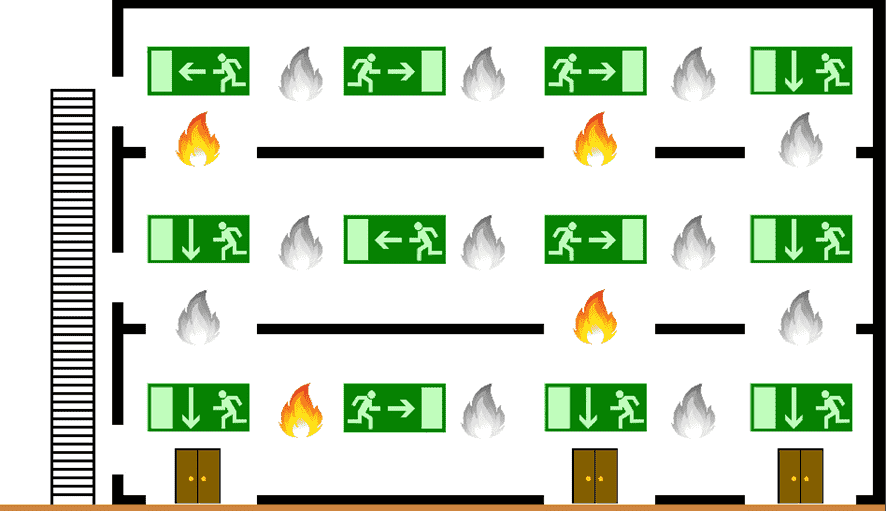
Statische Schilder bieten zwar Orientierung, leiten aber unabhängig von der aktuellen Notfallsituation immer in dieselbe Richtung. Das vorgestellte System nutzt moderne Technologien wie Wegfindungsalgorithmen, E-Paper und Kameras in Kombination mit Künstlicher Intelligenz (KI), um dynamische Fluchtwege in Echtzeit zu optimieren.



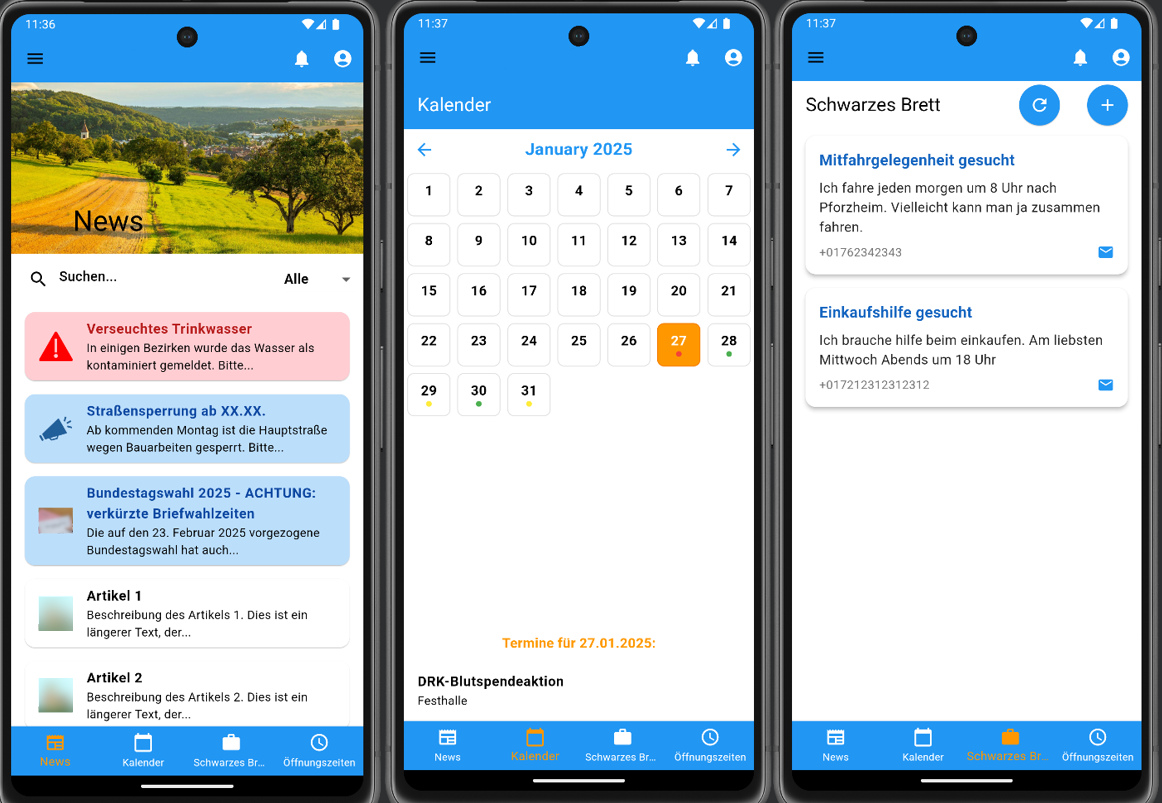
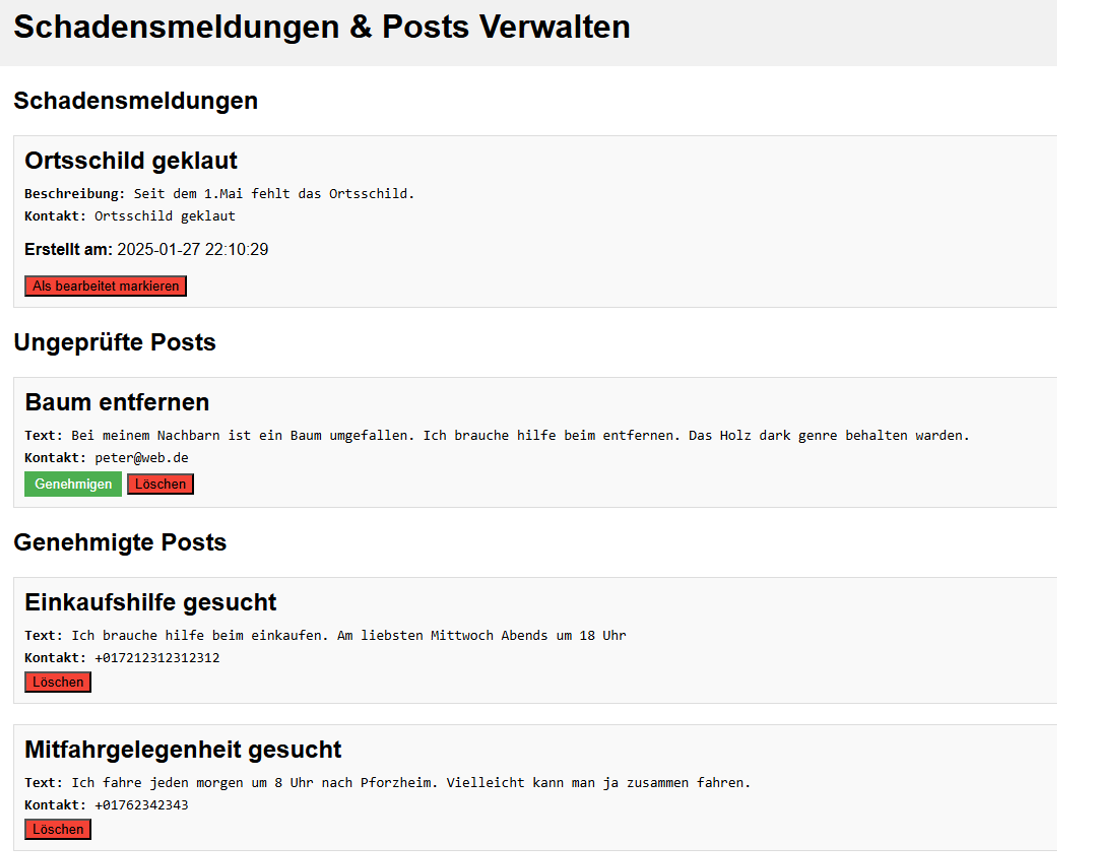
Das Ziel des Projekts ist die Entwicklung einer Gemeinde-App, die die Kommunikation zwischen Bürgern und Verwaltung verbessern soll. Die App wird Funktionen wie Nachrichten, Dienstleistungsanfragen, Veranstaltungskalender, Feedback-Möglichkeiten und Notfallbenachrichtigungen bieten.
Für die Umsetzung sind folgende Schritte entscheidend: Bedarfsanalyse durch Interviews und Umfragen, detaillierte Projektplanung inklusive Budget und Ressourcen, Design und Prototyping der Benutzeroberfläche, Auswahl geeigneter Technologien für die Entwicklung, Implementierung von Backend-Infrastruktur und Integration von APIs, umfangreiche Tests und Deployment in den App Stores sowie anschließende Wartung und Weiterentwicklung.
Ziel dieser Projektarbeit ist es, dem Benutzer zu ermöglichen, die Heckklappe nicht nur aus der Ferne automatisch öffnen zu lassen, sondern diese auch schließen zu können.
Der Audi A4 8K bietet die Möglichkeit, die Heckklappe automatisch per Funkschlüssel, einem Taster an der Fahrertür und einem externen Taster an der Heckklappe zu öffnen. Die Heckklappe lässt sich von innen über einen weiteren Taster schließen, was jedoch umständlich ist. Ziel des Projekts ist es, die Heckklappe auch aus der Ferne über den Funkschlüssel und über den Taster an der Fahrertür schließen zu können, um den Komfort zu erhöhen und das Zurücklaufen zum Fahrzeug zu vermeiden.
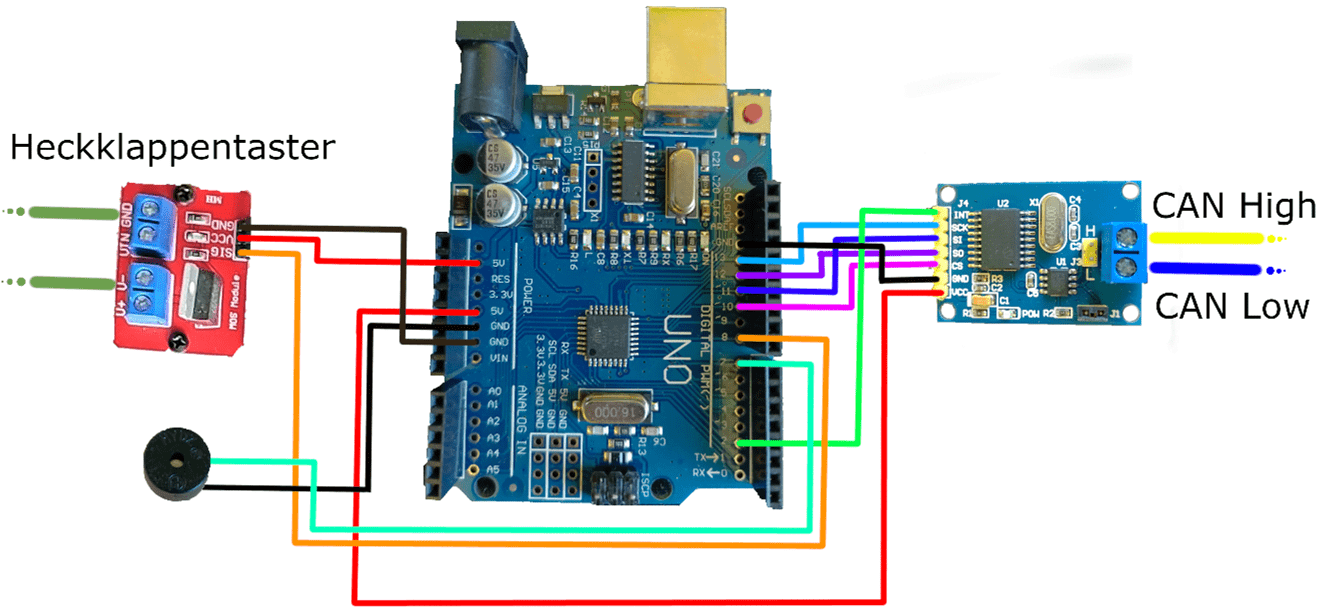
Das Erweiterungsmodul soll das Heckklappensteuergerät ansteuern, sodass die Heckklappe schließt, wenn der Funkschlüssel oder der Taster an der Fahrertür betätigt wird. Die Systemkomponenten wie das Heckklappensteuergerät, das Zentralverriegelungssteuergerät, das Türsteuergerät und das CAN-Gateway sind über den Komfort-CAN mit einer Geschwindigkeit von 100kBaud verbunden. Das Zentralverriegelungssteuergerät empfängt das Signal des Funkschlüssels und legt es auf den CAN-Bus, während das Türsteuergerät das Signal des Tasters in der Fahrertür auf den CAN-Bus legt. Das CAN-Gateway fungiert als zentrale Schnittstelle des Fahrzeugs.
Der aktuelle Zustand des Fahrzeugs, ob verriegelt oder entriegelt, beeinflusst die Funktion der Heckklappe. Bei entriegeltem Zustand öffnet die Heckklappe, bei verriegeltem Zustand bleibt sie geschlossen. Die CAN-Kommunikation wurde mit dem CAN-Interface VN1610 und der Software CANoe von Vector analysiert.
Das Modul nutzt einen Arduino zur Überbrückung des Heckklappentasters mithilfe eines MOSFETs. Wenn der Arduino innerhalb von zwei Sekunden dreimal das entsprechende Signal von Türsteuergerät oder Zentralverriegelungssteuergerät empfängt, aktiviert er den MOSFET, der die Heckklappe schließt. Die Position der Heckklappe wird durch CAN-Botschaften überwacht, um sicherzustellen, dass sie sich nicht in einem ungewollten Zustand befindet.
Die Simulation mit der Software CANoe von Vector ermöglicht es, das System zu testen und Fehler vor der tatsächlichen Integration zu minimieren. Dabei wird das Verhalten des realen Systems nachgestellt, was die spätere Integration erleichtert.
Der Arduino ist direkt mit der Autobatterie verbunden und benötigt kontinuierlich Strom, was zu einer schnelleren Entladung der Batterie führt. Das Modul ist noch ein Prototyp, und für den finalen Betrieb sind rechtliche Prüfungen erforderlich. Um den Stromverbrauch zu reduzieren, soll der Arduino in einen Sleep-Modus versetzt werden, wenn das Fahrzeug nicht in Benutzung ist.
Letztlich ermöglicht das entworfene Modul das bequeme Schließen der Heckklappe per Funkschlüssel und Taster in der Fahrertür, erfüllt die Projektanforderungen und bietet eine intuitive Bedienung. Es handelt sich jedoch um ein Prototyp, der hinsichtlich Stromverbrauch und rechtlicher Zulassung weiter optimiert werden muss.
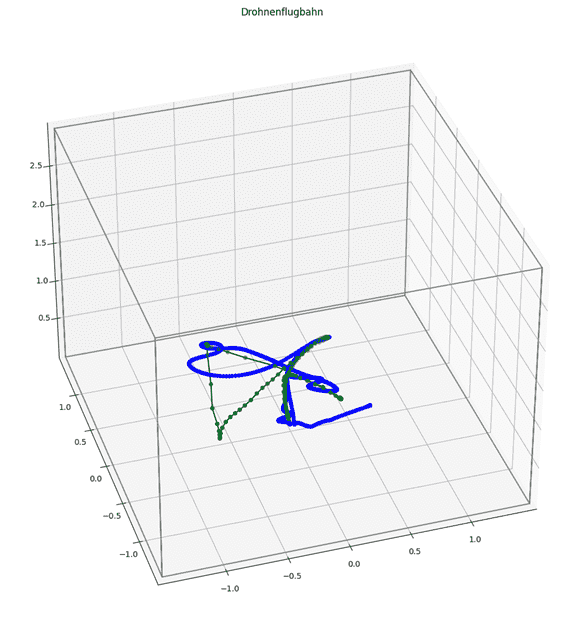
Die Projektarbeit beschäftigt sich mit der simulationsgestützten Drohnensteuerung mithilfe einer Crazyflie Drohne, einem Vicon-System und einem Simulator. Ziel war es, die Drohne präzise zu steuern und Flugrouten vorab zu planen. Die Arbeit beinhaltet die Analyse der Anforderungen an den Simulator und die Drohnensteuerung, die Systemanalyse mit Fokus auf die Orientierung im Raum und die Simulation der Drohne, sowie Funktionstests zur Überprüfung des Flugverhaltens und der Sicherheitsfunktionen.
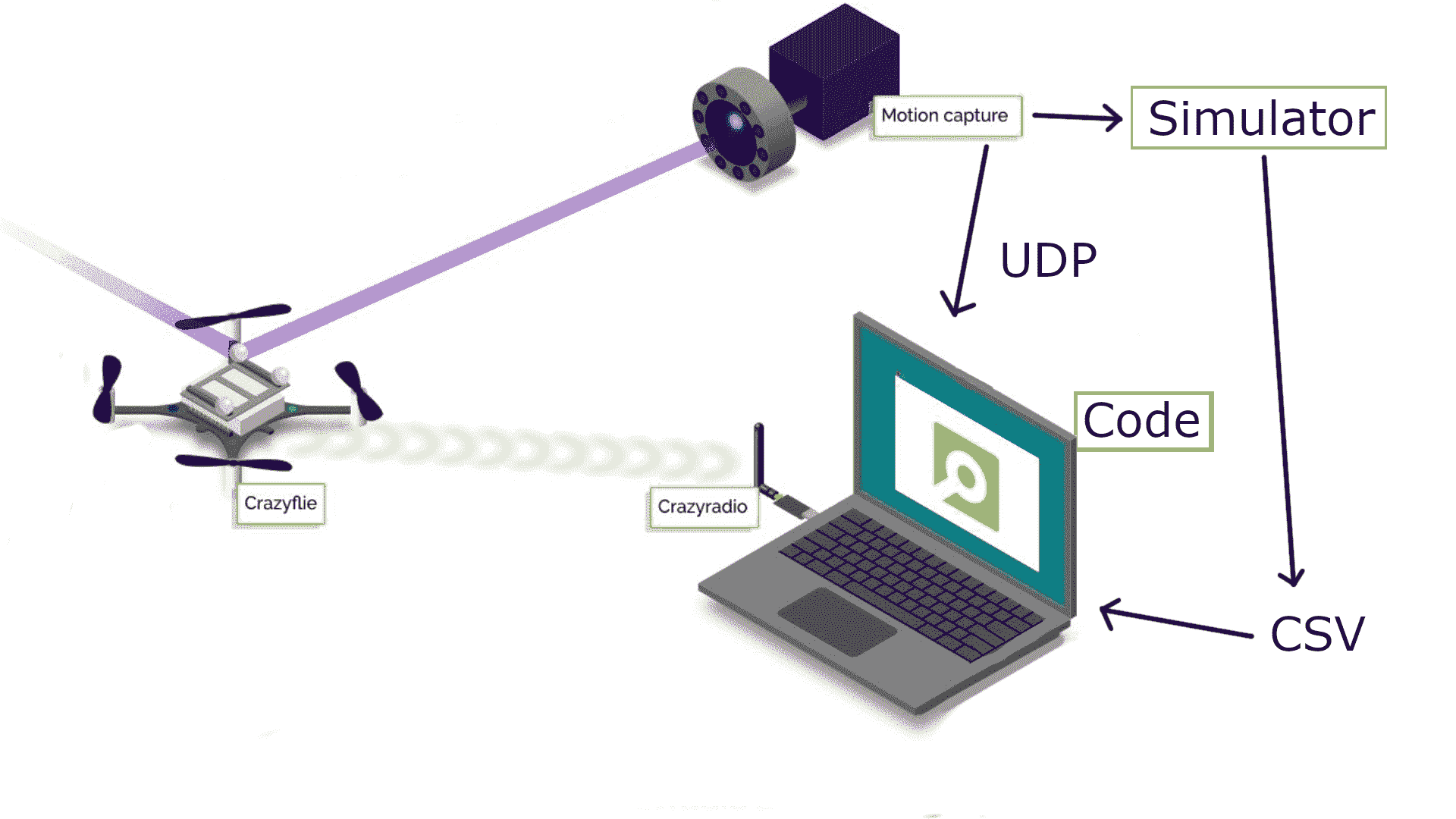
Die Simulation wurde in der Programmiersprache C++ erstellt und die Drohnensteuerung in der Programmiersprache Python. Es wurde eine UDP Verbindung eingebaut sowohl in die Steuerung als auch in den Simulator um die gemessenen Koordinaten des Vicon-Systems dort nutzen zu können.
Zur Bestimmung der Position der Drohne wurde ein Vicon-System (für die Erkennung sind die kleinen reflektierenden Bälle an der Drohne) verwendet, das die Position und Orientierung der Drohne im Raum misst. Dafür mussten Koordinatensysteme (Quaternionen) in der Simulation eingebaut werden, um die Drohne im Raum zu steuern.
Die Drohne kann mit der Simulation und Steuerung nun: eigene Wege einspeichern, diese nur Simulieren, diese komplett selbstständig nachfliegen. Die Genauigkeit beträgt dabei wenige Zentimeter wie in der Abbildung unten zu sehen.


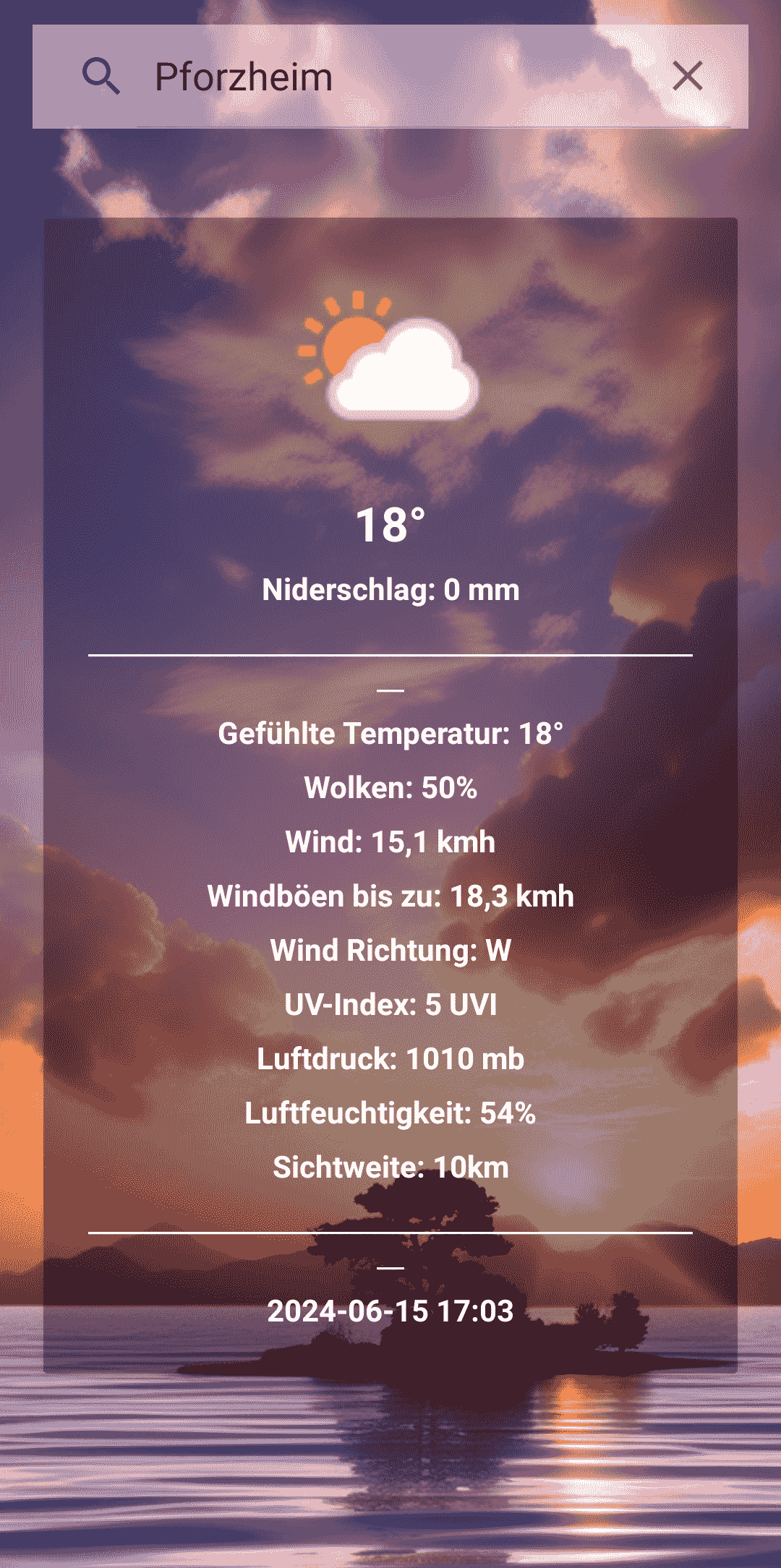
Die App kann das aktuelle Wetter eines eingegebenen Standortes anzeigen.
Durch die Verwendung von C#, Xamarin und .NET kann die App auf verschiedenen Plattformen wie Android und iOS zur Verfügung gestellt werden.
Die App wurde mit dem OpenWeatherMap API erstellt, um die Wetterdaten zu erhalten.
Ein Kumpel und ich haben in unserer Freizeit angefangen ein Spiel zu Programmieren. Mittlerweile sind wir schon ein fünfköpfiges Team, mit welchem wir nun, nach dem der Prototyp an einige Tester ging, die Beta entwickeln.
Für das Projekt wird Unity 3D verwendet. Dabei schreiben wir den Code selbst und modellieren die Modelle, Animationen und Texturen selbst in Blender.

Storyline des Spiels:
In einer fernen Zukunft hat die Menschheit die Grenzen des bekannten Universums erkundet und ist dabei auf eine rätselhafte Entdeckung gestoßen: eine Technologie, die es ermöglicht, durch Raum und Zeit zu reisen. Diese bahnbrechende Entdeckung führt zur Entwicklung des Legacy-Projekts, einer Initiative, die es den Menschen ermöglicht, die Geschichte der Erde neu zu erleben und zu formen.
Der Spieler übernimmt die Rolle eines Piloten, der für das Legacy-Projekt rekrutiert wurde. Seine Aufgabe ist es, mit einem hochentwickelten Raumschiff durch die Zeiten zu reisen und in verschiedenen Epochen der Geschichte zu intervenieren, um die Zukunft der Menschheit zu sichern.
Die Reise beginnt in der Bronzezeit, einer Ära der Primitivität und des Überlebenskampfes. Der Spieler muss sich den Herausforderungen der frühen Menschheitsgeschichte stellen, indem er gegen wilde Tiere kämpft, primitive Stämme verteidigt und antike Geheimnisse entdeckt.
Mit fortschreitender Zeit reist der Spieler durch verschiedene Epochen, vom Mittelalter über die industrielle Revolution bis hin zur fernen Zukunft. Dabei wird er mit einer Vielzahl von Gegnern konfrontiert, darunter wilde Bestien, feindliche Armeen und sogar außerirdische Eindringlinge.
Um sich diesen Herausforderungen zu stellen, kann der Spieler Türme zur Unterstützung aufstellen, die ihm im Kampf zur Seite stehen. Diese Türme können mit verschiedenen Waffen und Fähigkeiten ausgestattet werden, um den Spieler in seiner Mission zu unterstützen.
Doch während der Spieler durch die Zeiten reist, entdeckt er auch dunkle Geheimnisse und verborgene Verschwörungen, die das Schicksal der Menschheit bedrohen. Es liegt an ihm, diese Gefahren zu bekämpfen und die Zukunft zu sichern, bevor es zu spät ist.
Instagram SeiteDiese Maschine ist dafür gebaut aus so wenig Zutaten wie möglich, so viele Cocktails wie möglich zu mischen.
Dafür steuert ein Raspberry Pi Zero 10 Pumpen. Über diese können dann die Cocktails gemixt werden.
Da sich Kohlensäure haltige Getränke nicht pumpen lassen, gibt es einige separate Zutaten, die von Hand hinzugefügt werden müssen.
Das faszinierende daran ist die Anzahl an theoretisch möglichen Cocktails die aus wenigen Zutaten entstehen können:
Cocktail Berechnung mit 10 Grundzutaten
Grundzutaten in der Maschine (10):
- Wodka, Rum, Gin, Tequila, Whiskey (Bourbon)
- Triple Sec, Cranberrysaft, Ananassaft, Orangensaft, Maracujasaft
Zusätzliche Zutaten (separat):
- Zitronensaft, Minzblätter, Grenadine, Zuckersirup, Mandelsirup
- Cola, Sprudel, Ginger Beer, Tonic Water
Berechnung:
Für die Auswahl von 3 Grundzutaten aus den 10 Grundzutaten gibt es \( \binom{10}{3} = 120 \) mögliche Kombinationen.
Für die zusätzlichen Zutaten haben wir:
- Für 1 zusätzliche Zutat: \( \binom{9}{1} = 9 \)
- Für 2 zusätzliche Zutaten: \( \binom{9}{2} = 36 \)
- Für 3 zusätzliche Zutaten: \( \binom{9}{3} = 84 \)
Die Gesamtanzahl der Cocktails mit 3 Grundzutaten und bis zu 3 zusätzlichen Zutaten ist also:
\( 120 \times (9 + 36 + 84) = 120 \times 129 = 15480 \) Cocktails.
Fazit:
Mit diesen Zutaten und Kombinationen sind bis zu 15.480 Cocktails möglich. Das Ergebnis hängt von den Mischverhältnissen und der Anzahl der Zutaten ab, aber die Berechnung zeigt, wie viele Variationen möglich sind.
Ob all diese Varianten schmecken muss dann natürlich erst getestet werden. :)


Ziel ist es eine KI zu schreiben, mit der es möglich ist musik generieren zu lassen. Diese soll entweder einzelne Lieder generieren oder auf Dauerschleife generieren und direkt abspielen.
Dafür wurden 2 Möglichkeiten getestet: einmal mittels MIDI-Daten und einmal über Spektogramme.
MIDI-Daten sind digitale Informationen, die Musikgeräte und Software verwenden, um Noten, Tonhöhen, Lautstärken und andere musikalische Parameter zu steuern und zu synchronisieren. Diese kann als Zahlenwerte der KI zum Trainieren und Generieren gegeben werden.
Für die Spektogramme werden Musikstücke in Blöcke unterteilt und in ein Spektogramme umgewandelt. Mit diesen Spektogrammen kann eine KI trainiert werden, ein Spektogramm zu erstellen dieses kann dann wieder in MP 3 konvertiert werden.
Beide Varianten benötigen derzeit noch Training.

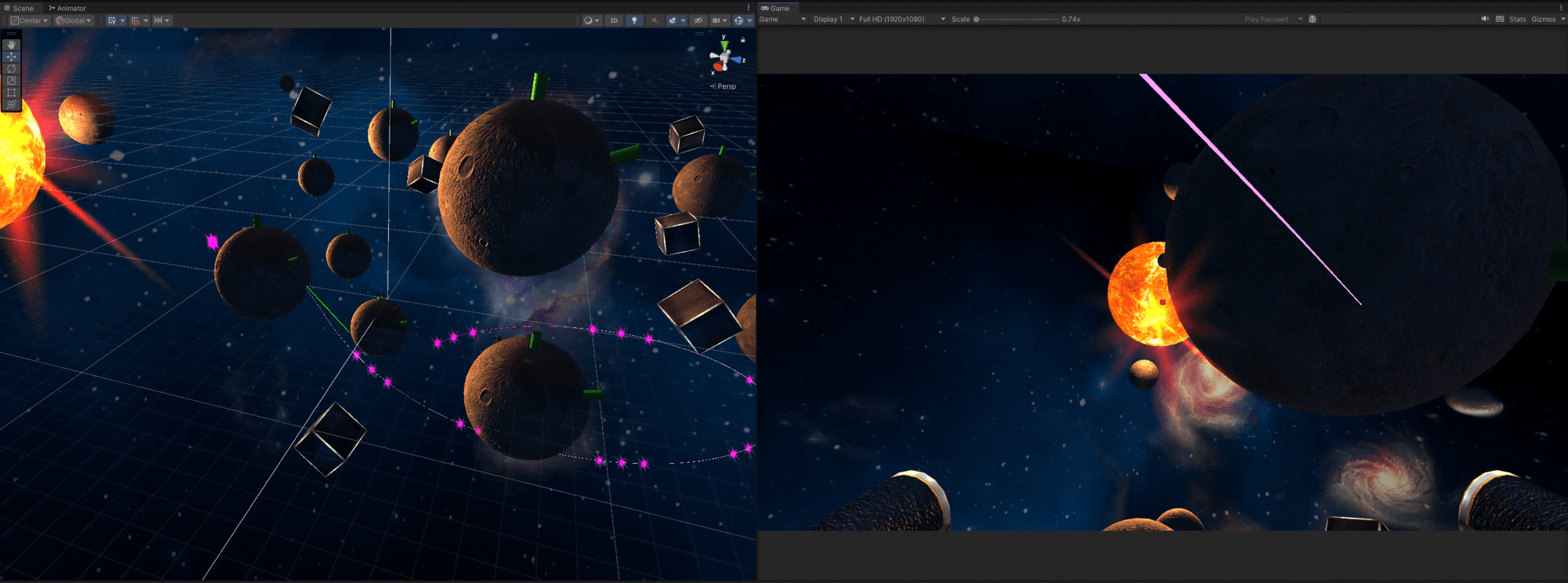
Procedural generierte Planetentexturen
Die Texturen werden abhängig von einem Seed generiert. Die dabei mögliche Anzahl an verschiedenen Texturen in zusammenhang mit der Anordnung und Anzahl der Planeten und der Textur der Sonne, ist nahezu endlos. Sie ist nur dadurch beschränkt, dass der Seed eine Float-Variable ist und daher begrenzt ist.
3D Jump and Run
Gravitationsbasieter Weltraum FPS
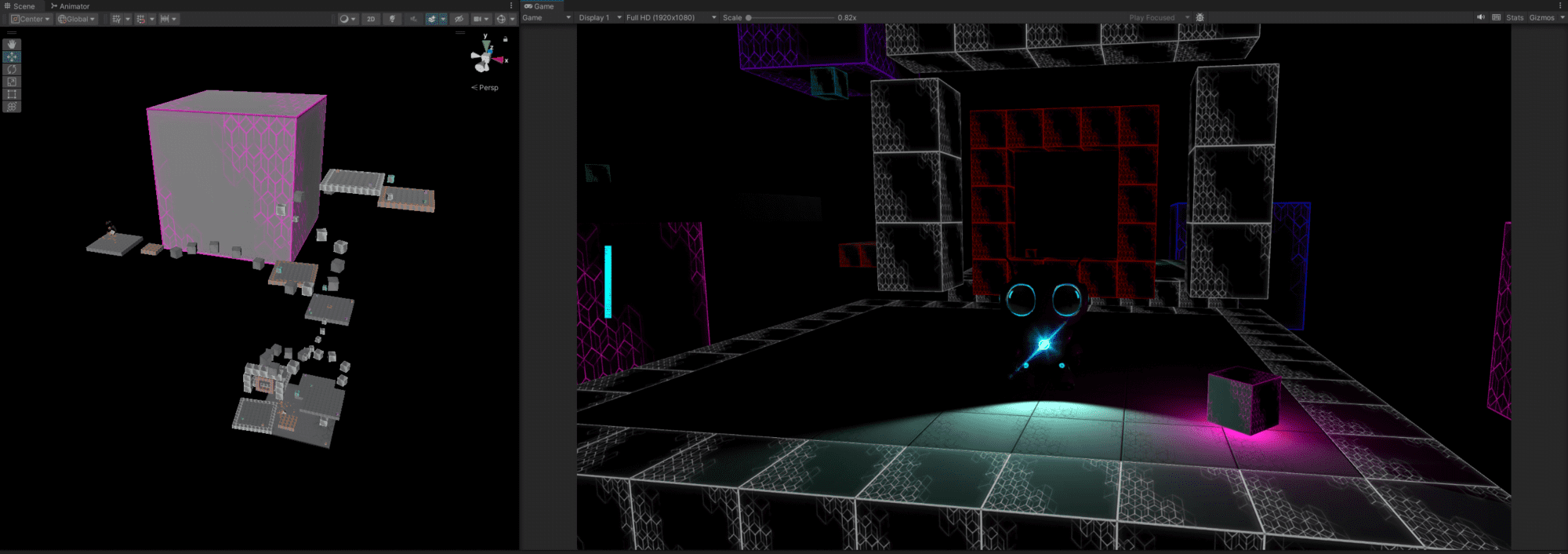
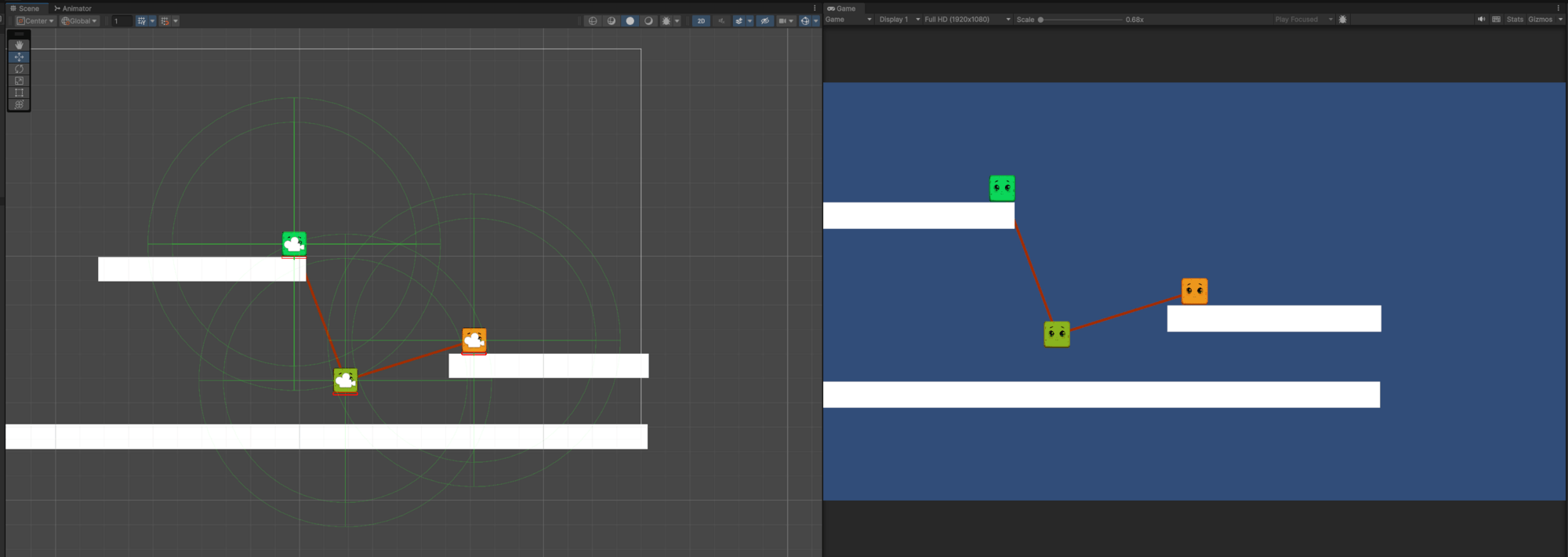
2D-Chained-Together

| Hochschule Master | Hochschule Pforzheim, Master Embedded Systems (vorraussichtlicher Abschluss: Anfang 2025) |
| Hochschule Bachelor | Hochschule Pforzheim, Bachelor Elektro- und Informationstechnik (Abschluss: 2023) |
| Uni Bachelor | KIT Karlsruhe, Bachelor Elektro- und Informationstechnik (gewechselt an die HS) |
| Gymnasium | Theodor-Heuss Gymnasium (G8) in Pforzheim Abitur 2018 |
| Grundschule | 2006-2010 Grundschule Engelsbrand |
| Sprachkentnisse | Englisch (Schulkenntnisse & HS-Kenntnisse), Latein (Schulkenntnisse) |
| Ferienjobs | Alfred Tronser GmbH Engelsbrand (2018) hapema GmbH Engelsbranad (2019) |
| Vereine | Jugendfeuerwehr (2014-2017) Volleyball (ehemalig) |
| Werkstudent |
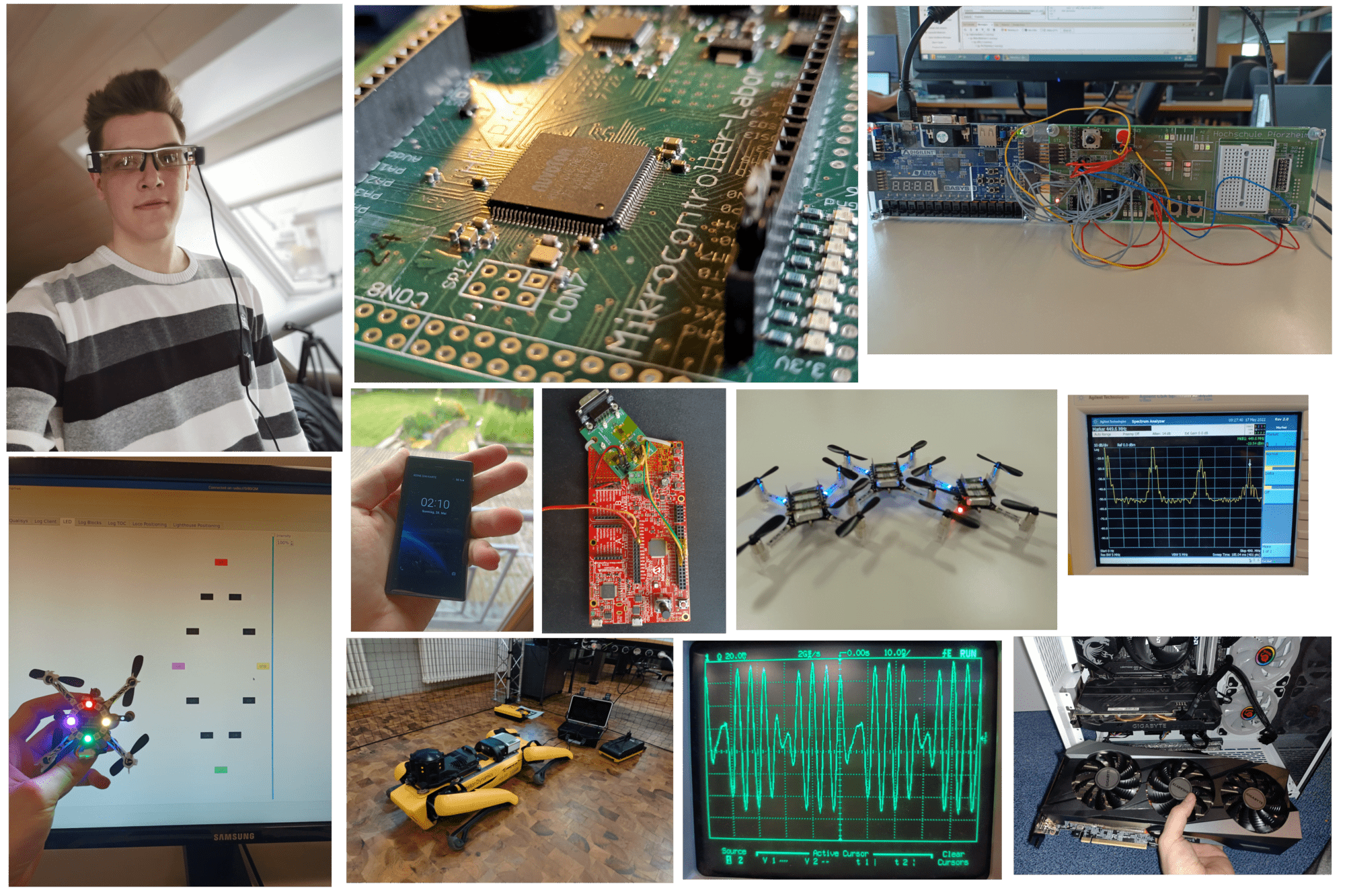
LTC-Laserdienstleistungen Engelsbrand (2020 - 2022) MAHLE Stuttgart (2023) Ich habe dort die Umstellung einer LABBOX auf einen Microkontroller, für ein Einweis-System für Wireless-Charging bei Autos, in meinem Praxissemester übernommen. Dabei wurde vorallem das einlesen der Sensordaten und die Übertragung an die Prüfstandsoftware über UART und CAN implementiert. Danach war ich der Ansprechpartner für diesen Teil des Projektes als Werkstudent. Und habe die neueren Werkstudenten eingelernt und betreut. Pressemitteilung MAHLE |
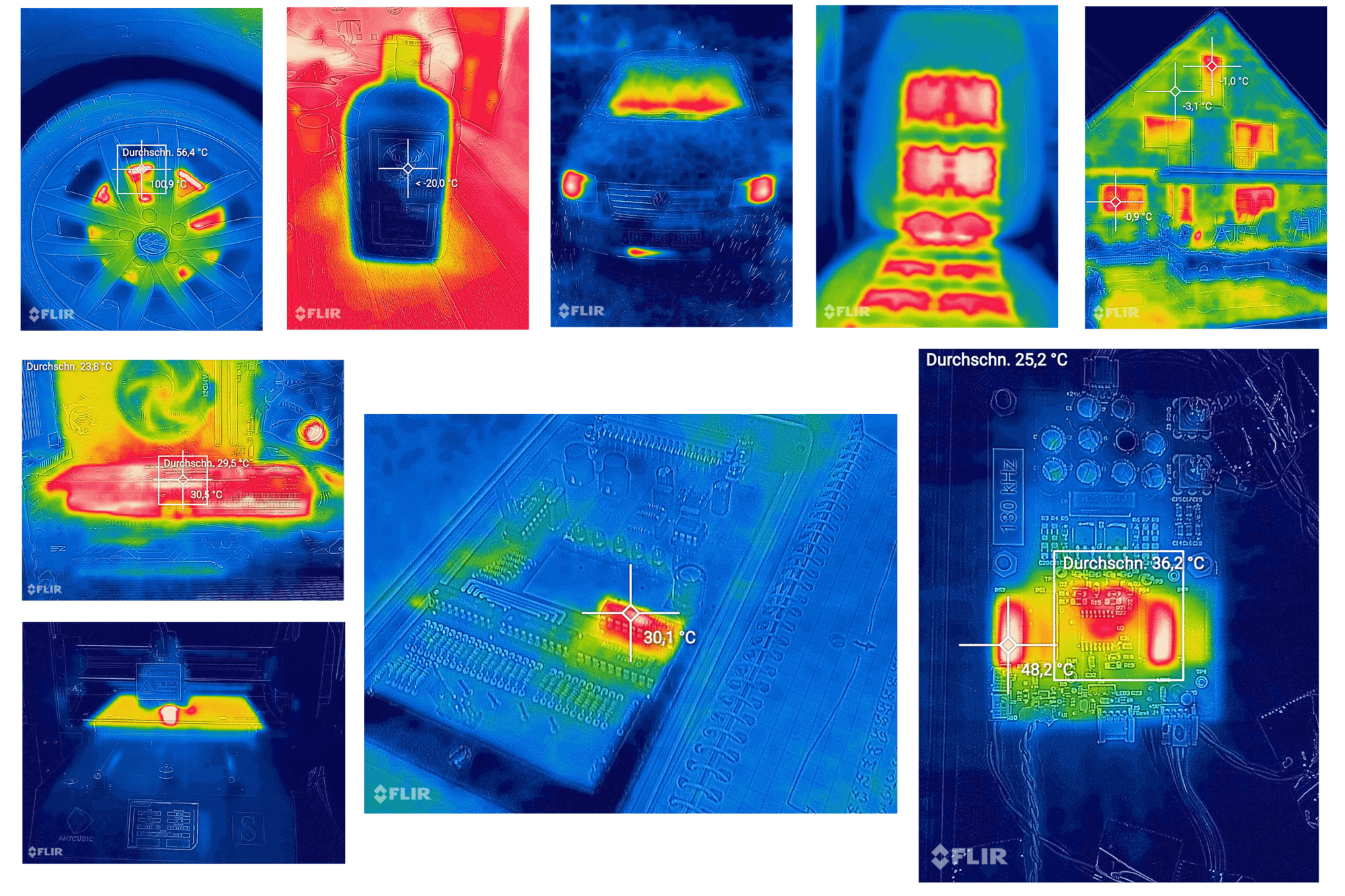
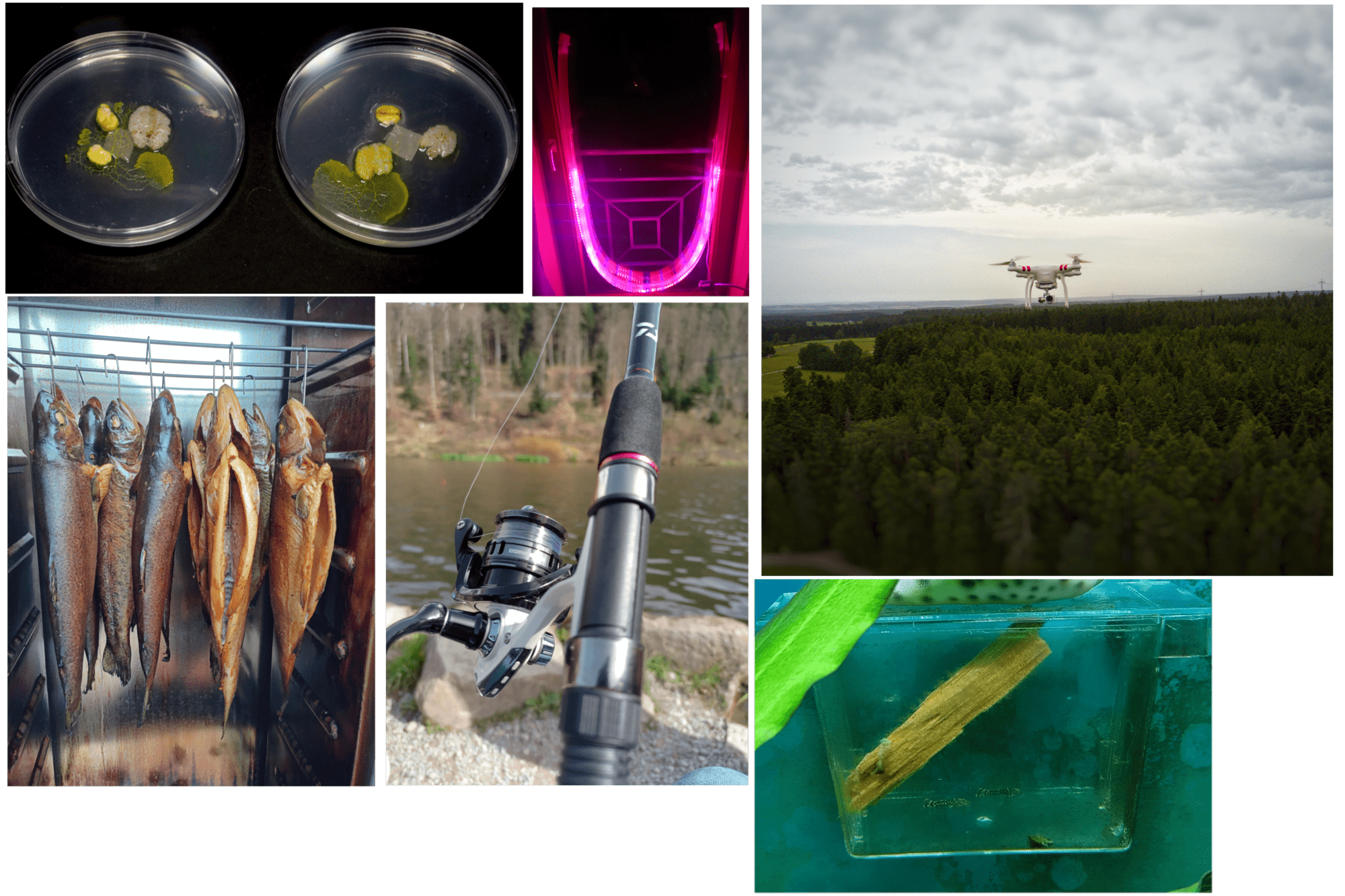
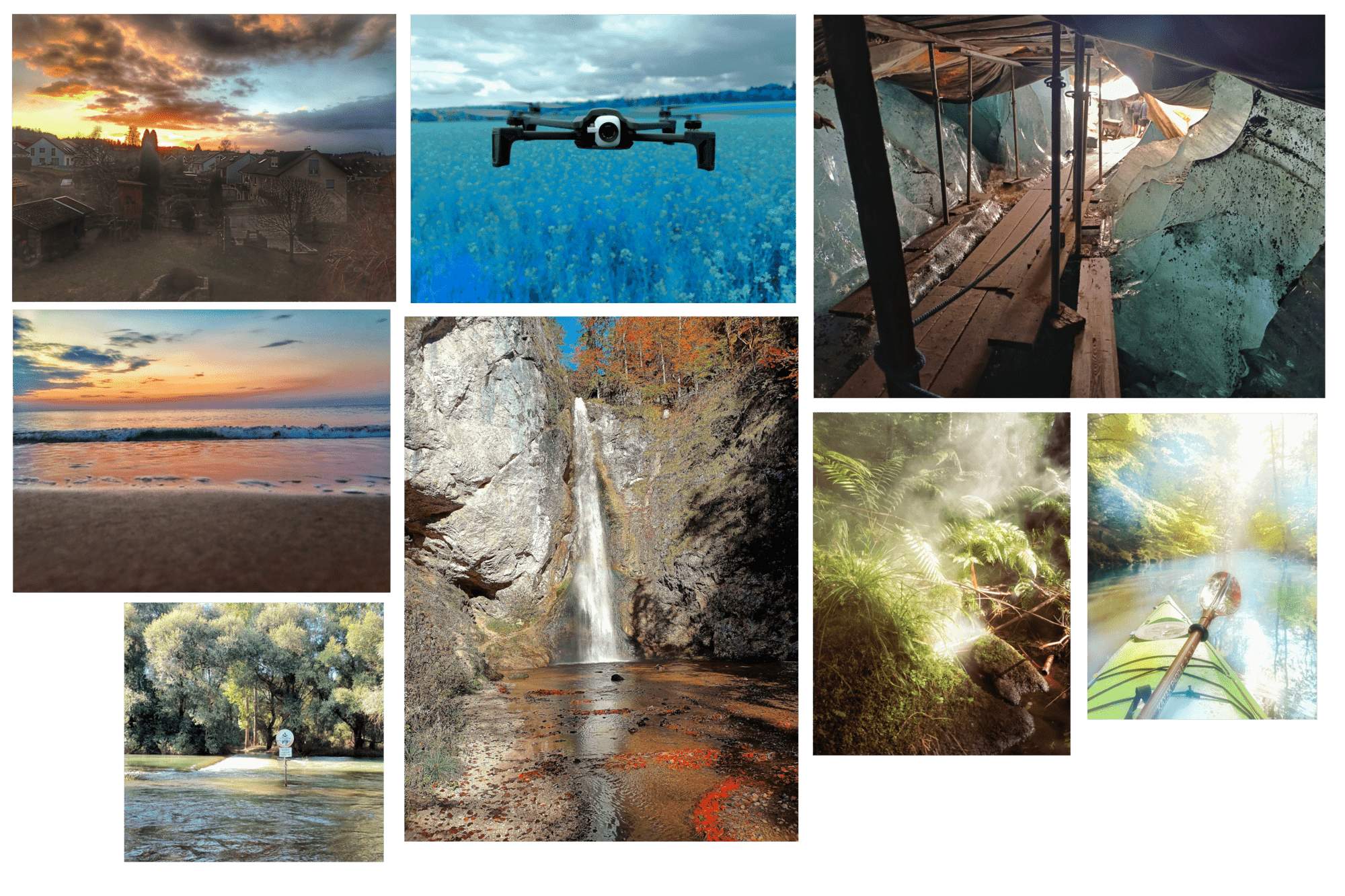
| Hobbys | Werken, Technik, Rasberry Pi und Arduino, 3D Rendering am PC, 3D Druck, Programmieren, Fotografieren und Fotos bearbeiten, Drohne fliegen und Videos bearbeiten, Kajak fahren |
| Fähigkeiten | C, C++, C#, Python, Tensorflow, Open CV, Crew AI, Matlab, Simulink, HTML, CSS, JavaScript, Autodesk Fusion, Blender, Unity, VHDL, Vitis HLS, Vivado, Cygwin, Word, Exel, Powerpoint. |

Reflective and bistable e-paper for smart and AI-controlled escape route signage
Von: Karlheinz Blankenbach, Ingo Mann, Fabian Forster, Steffen Reichel
(Diese Veröffentlichung ist aus meiner Bachelorarbeit entstanden. Der Fokus dabei liegt auf den E-Paper-Displays)
Zum Artikel
Hier ist ein Link zu meiner Kudos Seite:
Kudos Profil










